
New network architectures will be weakly coupled
Aarne Mämmelä, VTT Technical Research Centre of Finland, Finland
Jukka Riekki, Center for Ubiquitous Computing, University of Oulu, Finland
Abstract
Future wireless network control architectures will be based on weakly coupled agents in the form of hybrid self-organizing networks that combine centralized and distributed control. Weakly coupled systems have been studied scientifically in many disciplines since the 1960s. Vertically and horizontally weakly coupled agents form a stable, scalable, and efficient hierarchical system. In communications, a central agent acts as a network manager with the purpose to guarantee fairness and constrain the use of basic resources such as energy, time, and bandwidth. The lowest level agents are transmitters and receivers that work almost autonomously due to weak vertical coupling. The system is based on time-scale separation of hierarchy levels: high-level agents act much more slowly than low-level agents. Horizontal coupling through interference between users is minimized by using orthogonal signals. This is called interference avoidance. All feedback loops at different hierarchy levels and at the same hierarchy level must be decoupled. This combination of vertical and horizontal decoupling of feedback control loops forms our main contribution in this paper.
Keywords: weak coupling, stability, scalability, efficiency
1. Introduction
Future communication networks in the smart and sustainable world must be stable, scalable, efficient, reliable, and agile. The fundamental limits of nature require using the basic resources such as energy, time (delay), and bandwidth efficiently, leading to different computation-communication trade-offs. Fulfilling these requirements calls for complex self-organizing systems that are invariably known to be weakly coupled multi-agent systems [1]. The agents realize intelligent behavior with feedback control [2]. Artificial intelligence (AI) provides knowledge for realizing such agents as AI can be seen as a theory of intelligent agents [3]. The resulting self-organizing networks (SONs) form their own topologies and routing patterns and adapt transmitters in each link to maximize the quality of service (QoS) of all users [4], [5]. The QoS may be measured by bit rates, reliability, and delays, which should be obtained with minimum energy.
In the present networks, feedback is commonly used in the physical, data link, and transport layers in the form of flow, congestion, error, and transmitter power control, synchronization, and channel estimation and equalization. However, feedback in the network layer is a rather recent idea that has been used, for example, in the Generic Autonomic Networking Architecture (GANA) by the European Telecommunications Standards Institute (ETSI) [6] and the Open Radio Access Network (O-RAN) architecture by the O-RAN Alliance [7]. The new intelligent network architectures ETSI Zero touch network & Service Management (ZSM) and ETSI Experiential Networked Intelligence (ENI) also use feedback to realize intelligent behavior. These ETSI working groups realize feedback with the observe-orient-decide-act (OODA) and monitor-analyze-plan-execute plus knowledge (MAPE-K) models.
Weak coupling is needed because, in general, optimization of parts does not lead to optimization of the whole unless the system is linear or weakly coupled [1]. The global behavior is also difficult to predict from the local behavior; hence some centralized control is needed. In addition, weak coupling provides tools for building stable networks [1]. Such tools are necessary, as feedback systems are not always stable but may even drift to chaotic behavior.
High-level agents must act much more slowly than low-level agents. This time-scale separation [8] produces weak vertical coupling but has been defined only partially by the recent new architectures. The GANA architecture defines fast and slow control loops [6], but their time scales are left open. If one layer changes a parameter in one direction and another layer in another direction with almost the same speed, the resulting conflict can create a stability problem. Self-coordination methods [9] are suggested to avoid and resolve this type of conflict. In the O-RAN architecture, the time scales called loop times are < 1 ms (real-time control loop), 1 ms - 1 s (near-real-time control loop), and > 1 s (non-real-time control loop). The scales are almost overlapping with no clear time-scale separation, and conflicts may be generated. Interference avoidance [10], in turn, produces weak horizontal coupling between control loops in a single layer, and has been used, for example, in the physical layer. Interference between users is minimized by using orthogonal signals. This is not always valid in for example code-division multiple-access (CDMA) and nonorthogonal multiple access (NOMA) systems where the signals are quasi-orthogonal or nonorthogonal, respectively, leading to cocktail party effects and the need for complex multi-user detection algorithms. All feedback loops at different hierarchy levels and at the same hierarchy level must be decoupled.
Feedback control consists of sensors, a decision block with some externally given goals, and actuators. The sensors observe the state of the network, the decision block plans actions advancing the goals, and the actuators perform the actions to control the state of the network. The actions transfer the network iteratively from the present state to the next state with a better performance. When each link is updated in this way, this results in the self-organization of the whole network. Feedback control is sometimes replaced with open-loop control that does not use any sensors. Open loop control is a fast but rough method to implement control, and therefore feedback control is usually preferred when accuracy is needed, and the somewhat slower operation can be accepted.
We suggest the small-world [11] and weak coupling [1] principles for designing communication networks for data and control information transmission, respectively. Weakly coupled and small-world systems are common in biological systems and social sciences. In biology, weak coupling is sometimes called near decomposability, and in social sciences, subsidiarity. Near decomposability includes the ideas of hierarchy, modularity, and weak coupling (i.e., weak or slow interaction) between both hierarchy levels and modules at the same level. Biological systems were developed through evolution, and they are known to be very resource efficient. Subsidiarity is a more prescriptive term than weak coupling, implying that decisions should be made at the lowest hierarchy level possible. The structure of weakly coupled systems can be designed by applying the small-world concept [11]. This concept defines a method to maximize network efficiency in terms of data communications both locally and globally. A small-world network is an intermediate form between regular and random networks. The method is based on short-cuts [12].
The small-world and weak coupling concepts are suitable for software-defined networks (SDN), which are programmable networks with separate data and control planes [13], now often generalized to the concept of network automation. Decoupling the control loops is an efficient method for organizing network control in SONs [1], thus leading to our main contribution in this paper. Furthermore, such weakly coupled systems have applications in control theory, modular electronics design, structured software design, cross-layer design, and Internet service architectures [1], [14]. More references can be found from our earlier paper [1].
2. Hierarchical weakly coupled network
A hierarchical weakly coupled SON is presented as a multi-agent system in Fig. 1, as a dominance hierarchy with several communication layers [1]. Sensor data propagate upwards in the hierarchy and control data downwards. The number of hierarchy levels is typically three but depends on the complexity of the system to be controlled. The weak central agent is called a network manager in communications, an arbitrator in game theory, and a leader in agent theory. Most of the decisions are made locally at the lowest possible level to avoid large delays. The lowest level agents work almost autonomously. The manager is needed to guarantee fairness in using basic resources since, in free competition, few lower-level agents may use most of the resources.
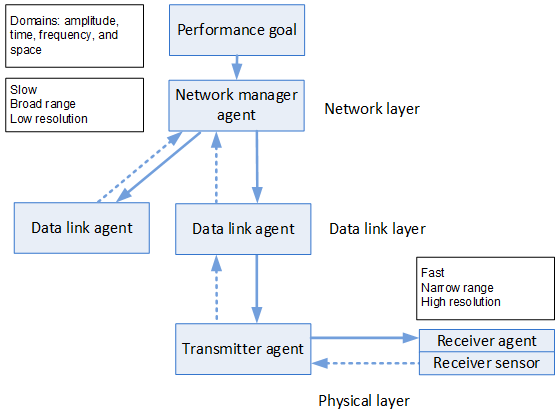
Figure 1. A hierarchical weakly coupled network. Only one link direction is shown in the physical layer.
The agents in the physical layer are adaptive transmitters and receivers, forming a communication link. Transmitters use sensor information received from the corresponding receiver sensors. A transmitter may change the direction (through beamforming), timing, frequency, and sometimes even the carrier phase of the transmission. Below each transmitter, an agent in the adaptive receiver controls the frame, symbol, and carrier phase synchronization locally. The transmission is bidirectional, and thus alongside each transmitter, there is a receiver and vice versa. The two directions are separated by different frequencies or time slots, defined by the data link agent, which more generally controls the use of the physical channel shared between several users. For brevity, we focus on one link direction only.
Hierarchical control decreases the complexity of a system with widely differing speed requirements. Without any hierarchy, the whole system should work at the highest speed. This would be inefficient as, for example, power consumption (in W or J/s) is directly proportional to the computing speed in operations per second (OP/s) and the energy efficiency of each operation (in J/OP).
Speeds at neighboring hierarchy levels can differ by orders of magnitude. In the network layer, the changes occur in 1-10 s intervals, in the data link layer in 1-10 ms intervals corresponding with the subframe and frame length, and in the physical layer in 0.1-1 s intervals when the bandwidth is 1-10 MHz. In the actual physical implementation, the minimum clock intervals are in the order of 1 ns when the maximum clock rates are 3-4 GHz.
The network consists of rational agents that sense and control the state of the network. Rationality means that the agent is able to reach its goals efficiently with a minimum amount of basic resources even in uncertain environments [2], [15]. According to the present theories in psychology, rationality is a more general and higher-level concept than intelligence. The agents in the highest hierarchy levels are complex and slow, while those in the lowest levels are simple and fast.
The range is broad, and the resolution low in the highest hierarchy levels, whereas the range is narrow, and the resolution high in the lowest hierarchy levels. The range and resolution are measured in amplitude, time, frequency, and spatial domains. For example, the range is the whole network in the network layer but a single link in the data link layer. In the physical layer, the range is related to a single physical parameter such as timing or carrier frequency. Therefore, the network layer has an overview of the situation and can better control the whole network for self-organization.
3. Stability is the most important requirement
Stability is the most important requirement for any system [1] as an unstable system is useless. Since self-organization is based on feedback loops in the form of rational agents, stability is a major problem to be solved. Stability depends on the properties of the feedback loops. First, only negative feedback loops are stable. Second, the speed of each loop must be much slower than the loop delay, and the loops in the hierarchy must have sufficient time-scale separation. Third, parallel loops must be uncoupled or mutually weakly coupled. The second and third properties are illustrated in Fig. 2, where each agent realizes a feedback loop.
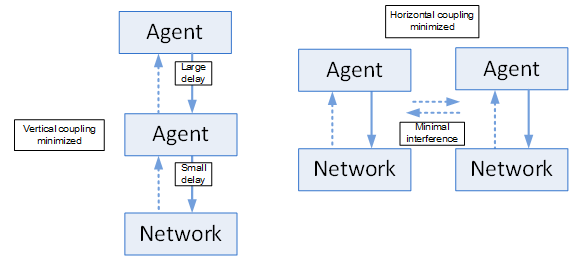
Figure 2. Stability of two feedback loops related to delays (left) and interference (right). The methods are called time-scale separation of hierarchy levels and interference avoidance between users, respectively.
The feedback may be negative or positive, but only negative feedback is known to be stable. For example, exponential growth is clear evidence of instability. Any exponential development will eventually stop because of fundamental limits and finite resources. For example, an amplitude range is always upper limited by saturation and lower limited by noise, thus forming limits to the resolution. If used, positive feedback must be located inside a negative feedback loop to stabilize the whole loop.
Feedback loops with the smallest possible delays and weakest possible mutual couplings have the best stability and highest convergence rate. This is the core idea in a weakly coupled network. As a communication network is spatially distributed, the delay may be significant when the distances between the components of a feedback loop (sensors, a decision block, and actuators) are long. A large delay may change negative feedback to unstable positive feedback. The delay can be shortened by placing all components of a feedback loop at the same location, either in a user equipment or in an edge server near the user. When this is not possible, feedback loops with long delays can be placed at higher hierarchy levels. These levels can operate slow enough because the feedback loops at the faster, lower hierarchy levels operate nearly autonomously. Slowness is a form of weak coupling. This is called time-scale separation of hierarchy levels [8].
In a wireless link, adaptive loops in the transmitter and receiver may be coupled and start to track each other, leading to instability. Here, the coupling can be decreased by placing the transmitter with its larger delay at a higher and slower hierarchy level than the receiver with its smaller delay. The delay in the transmitter is larger because of the physical distance to the receiver sensor (Fig. 1).
In the physical layer, the radio waves that tend to propagate in all directions may cause interference, hence increasing coupling between links. Transmitter power control loops provide an example of the effects of this coupling. If many users share a frequency band, the interference may cause a cocktail party effect: all transmitters tend to use the maximum power, resulting in poor performance. Coupling can be decreased, i.e., interference avoided between users, by using orthogonal signals in the physical layer. For example, time-division multiple-access is an interference avoidance method [10].
4. Scalability comes next
Scalability is also an important system requirement in SONs. The conventional degrees of centralization include centralized, decentralized, and distributed systems [2]. In communications networks, a decentralized system corresponds to a set of independent network nodes before actual networking. A centralized system is a tightly coupled system where the lower-level agents are forced to cooperate with each other. When the size of the system increases, the information needed to control the system grows exponentially. Also, the decision delays may be large, and hence stability problems are possible unless some hierarchy is used.
On the other hand, a decentralized system has no hierarchy, and the agents are autonomous and compete with each other. They optimize themselves, but the whole is not optimized because of their bounded rationality: individual agents usually do not make decisions that add up to the good of the whole. If evolution is possible, this may or may not slowly lead to optimization. In practice, centralized systems drift towards partial decentralization and decentralized systems towards partial cooperation.
A compromise between centralized and decentralized systems is a distributed system. There is no hierarchy, but the agents exchange information, at least with their closest neighbors. In this way, they slowly get an overview of the situation of the whole network. Distributed systems have many beneficial properties, such as scalability. However, decentralized and distributed systems use competition, and such systems may not be optimal.
We need another compromise between centralized and decentralized systems. The compromise is a combination of centrally controlled and distributed networks called hybrid control [5], [6]. In such a weakly coupled hierarchical system, the central agent is weak, and the lower-level agents act almost autonomously. This architecture introduces flexibility since it supports all degrees of centralization, from centrally controlled at one extreme to decentralized at another extreme, and anything in between (e.g., distributed), depending on the strength of the coupling. In conclusion, weakly coupled systems can obtain scalability.
5. Efficiency, reliability, and agility
Weakly coupled hierarchical networks have additional favorable properties, including efficiency, reliability, and agility [1]. The SONs suggested in this paper have these properties as they are weakly coupled. Biological systems are a product of the evolution of billions of years. They are weakly coupled and known to be highly efficient. Weakly coupled systems are reliable since errors do not propagate [14]. Reliability is also dependent on fault tolerance and robustness. These two properties are attained using feedback control, redundancy, structural stability, and modularity.
Optimal systems are efficient but not necessarily robust because they do not use redundancy. Thus, weakly coupled systems should also be redundant, for example, in the form of alternate routes from the source to the destination. As another example, if a network manager is destroyed, a weakly coupled network is still able to work if a substitute is available in a different geographical location. Weakly coupled systems are agile [4], which means that they can adapt to fast changes in the environment. For example, evolution would not have had enough time to develop in biology unless a weakly coupled hierarchical and modular system had been used.
6. Conclusion
We have proposed weakly coupled systems in the form of hybrid SONs as the basis for the architecture of future networks. A hybrid SON combines the ideas of distributed and weak centralized control. Such networks have many favorable properties, including stability, scalability, efficiency, reliability, and agility. Stability is a core requirement since otherwise, a network is useless. Stability may be compromised if one is not careful since the new intelligent network architectures include feedback loops consisting of sensors, decision blocks with some externally given goals, and actuators that change the state of the network. Large delays may change a negative feedback loop to a positive feedback loop. Furthermore, the loops may interact with each other, especially at the lowest level, because of interference. These problems can be avoided by decoupling the feedback loops from each other using time-scale separation of hierarchy levels and interference avoidance between users. All feedback loops at different hierarchy levels and at the same hierarchy level must be decoupled. This is our main contribution in this paper. Such weakly coupled systems have a long history since the 1960s, and therefore many of their properties have been tested in different disciplines. An important research problem for the future is the selection of the performance goals and related constraints to jointly optimize bit rates, reliability, delays, and energy efficiency.
Acknowledgment
This work was supported in part by the EU H2020 project DEDICAT 6G under Grant no. 101016499 and in part by the Academy of Finland through the 6G Flagship project under Grant no. 318927. The contents of this publication are the sole responsibility of the authors and do not in any way reflect the views of the EU. Discussions with Abdelaali Chaoub, Ranganai Chaparadza, and Jyrki Huusko are gratefully acknowledged.
References
[1] A. Mämmelä and J. Riekki, “Subsidiarity and weak coupling in wireless networks,” in Proc. EuCNC’21.
[2] J. Riekki and A. Mämmelä, “Research and education towards smart and sustainable world,” IEEE Access, vol. 9, pp. 53156-53177, 2021.
[3] S. Russell and P. Norvig, Artificial Intelligence: A Modern Approach, 3rd ed. Upper Saddle River, NJ: Prentice-Hall, 2010.
[4] O. G. Aliu, A. Imran, M. A. Imran, and B. Evans, “A survey of self-organisation in future cellular networks,” IEEE Commun. Surveys Tuts., vol. 15, no. 1, pp. 336-361, 1st Quart., 2013.
[5] H. Fourati, R. Maaloul, L. Chaari, and M. Jmaiel, “Comprehensive survey on self-organizing cellular network approaches applied to 5G networks,” Computer Networks, vol. 199, pp. 1-24, 9 November 2021, Art. no. 108435.
[6] ETSI TS 103 195-2 V1.1.1, “Autonomic network engineering for the self-managing Future Internet (AFI); Generic Autonomic Network Architecture; Part 2: An architectural reference model for autonomic networking, cognitive networking and self-management,” May 2018.
[7] “O-RAN operations and maintenance architecture,” O-RAN Alliance, Alfter, Germany, Technical Specification O-RAN.WG1.O-RAN-Architecture-Description-v05.00, July 2021.
[8] I. F. Akyildiz and X. Wang, “Cross-layer design in wireless mesh networks,” IEEE Transactions on Vehicular Technology, vol. 57, no. 2, pp. 1061-1076, March 2008.
[9] A. Bayazeed, K. Khorzom, and M. Aljnidi, “A survey of self-coordination in self-organizing network,” Computer Networks, vol. 196, pp. 1–32, 4 September 2021, Art. no. 108222.
[10] G. J. Pottie, “System design choices in personal communications,” IEEE Personal Communications, vol. 2, no. 5, pp. 50 - 67, Oct. 1995.
[11] M. E. J. Newman, Networks: An Introduction, 2nd ed. New York: Oxford University Press, 2018.
[12] A. Helmy, “Small worlds in wireless networks,” IEEE Communications Letters, vol. 7, no. 10, pp. 490-492, October 2003.
[13] B. A. A. Nunes, M. Mendonca, X.-N. Nguyen, K. Obraczka, and T. Turletti, “A survey of software-defined networking: Past, present, and future of programmable networks,” IEEE Commun. Surveys Tuts., vol. 16, no. 3, pp. 1617–1634, 3rd Quart., 2014.
[14] C. Pautasso and E. Wilde, “Why is the web loosely coupled? A multi-faceted metric for service design,” in Proc. WWW’09.
[15] K. E. Stanovic, R. E. West, and M. E. Toplak, The Rationality Quotient: Toward a Test of Rational Thinking. Cambridge, MA: MIT Press, 2016.
Biographies Aarne Mämmelä received the degree of D.Sc. (Tech.) (with honors) from the University of Oulu in 1996. He was with the University of Oulu from 1982 to 1993. In 1993 he joined the VTT Technical Research Centre of Finland in Oulu. Since 1996 he has been a Research Professor of wireless communications. He visited the University of Kaiserslautern in Germany in 1990-1991 and the University of Canterbury in New Zealand in 1996-1997. He has been an advisor to 10 doctoral students and published over 40 journal papers and over 100 conference papers.
Aarne Mämmelä received the degree of D.Sc. (Tech.) (with honors) from the University of Oulu in 1996. He was with the University of Oulu from 1982 to 1993. In 1993 he joined the VTT Technical Research Centre of Finland in Oulu. Since 1996 he has been a Research Professor of wireless communications. He visited the University of Kaiserslautern in Germany in 1990-1991 and the University of Canterbury in New Zealand in 1996-1997. He has been an advisor to 10 doctoral students and published over 40 journal papers and over 100 conference papers.
 Jukka Riekki received the D.Sc. (Tech.) degree from the University of Oulu, Finland, in 1999. Since 2001, he has been a professor of software architectures for embedded systems at the University of Oulu and since 2014, the Dean of the Faculty of Information Technology and Electrical Engineering. He visited Intelligent Systems Division, Electrotechnical Laboratory, Tsukuba, Japan, in 1994–1996. He has been an advisor of 10 doctoral theses. He has published 45 journal papers, six book chapters, and over 180 conference papers.
Jukka Riekki received the D.Sc. (Tech.) degree from the University of Oulu, Finland, in 1999. Since 2001, he has been a professor of software architectures for embedded systems at the University of Oulu and since 2014, the Dean of the Faculty of Information Technology and Electrical Engineering. He visited Intelligent Systems Division, Electrotechnical Laboratory, Tsukuba, Japan, in 1994–1996. He has been an advisor of 10 doctoral theses. He has published 45 journal papers, six book chapters, and over 180 conference papers.
Subscribe to Tech Focus
Join our IEEE Future Networks Technical Community and receive IEEE Future NetworksTech Focus delivered to your email.
Article Contributions Welcome
Submit Manuscript via Track Chair
Author guidelines can be found here.
Other Future Networks Publications
IEEE Future Networks Tech Focus Editorial Board
Rod Waterhouse, Editor-in-Chief
Mithun Mukherjee, Managing Editor
Imran Shafique Ansari
Anwer Al-Dulaimi
Stefano Buzzi
Yunlong Cai
Zhi Ning Chen
Panagiotis Demestichas
Ashutosh Dutta
Yang Hao
Gerry Hayes
Chih-Lin I
James Irvine
Meng Lu
Amine Maaref
Thas Nirmalathas
Sen Wang
Shugong Xu
Haijun Zhang
Glaucio Haroldo Silva de Carvalho